
Sensor de choque CAT3 PRO para robots de soldadura

Donde grandes cantidades y tiempos de ciclo elevados son parte de la vida diaria, las colisiones con robots de soldadura son más o menos inevitables. Una colisión durante la soldadura robotizada, tanto en procesos MIG / MAG como TIG, con la antorcha de soldadura en la pieza de trabajo o el propio sistema puede deformar las piezas de desgaste de la antorcha, dañar la pieza de trabajo y destruir la antorcha del robot. Cada reparación y cada reemplazo de la antorcha cuesta tiempo y, por lo tanto, dinero. El tiempo de inactividad es caro. Si ocurren con más frecuencia, esto puede reducir rápidamente los márgenes en las empresas de fabricación. Una protección de apagado automático en el sensor de choque de la antorcha del robot resuelve este problema. Pero esto también debe ser robusto y confiable. El CAT3 PRO de ABICOR BINZEL es una solución ideal.
Con el sensor de choque de antorcha robot CAT3 PRO disponible en las versiones CAT3 PRO CR (con brida de liberación cilíndrica) y CAT3 PRO TR (con brida de liberación cónica), se encuentra en el mercado un artículo que ahora protege la antorcha de soldadura y su equipo aún mejor en el caso de colisiones. El CAT3 PRO asegura que el robot se apague inmediatamente en caso de colisión y así evitar daños. Gracias a la excelente precisión de restablecimiento, el robot de soldadura vuelve a estar disponible de inmediato, sin necesidad de volver a aprender. Este sistema de montaje de antorcha de ABICOR BINZEL está diseñado para robots de soldadura estándar con un ensamble de cables externo.
Y lo mejor de todo: sin reprogramar el robot de soldadura, CAT3 PRO CR y CAT3 PRO TR de ABICOR BINZEL simplemente reemplazan los sensores de antorcha anteriores:
- CAT2
- CAT2-HL
- CAT3
Toda la información de un vistazo
Características especiales del CAT3 PRO
En el diario entorno industrial, las exigencias impuestas a las unidades de soldadura y todos los equipos de soldadura son extremadamente altas. Se presta especial atención a la calidad y la seguridad para mantener los tiempos de inactividad lo más bajos posible. Los sensores de choque CAT3 PRO CR y CAT3 PRO TR con protección de apagado integrada son aún más estables y robustos en comparación con sus versiones anteriores CAT3, CAT2 y CAT2-HL. La precisión de reinicio (TCP) de las antorchas de soldadura se ha mejorado aún más, lo que reduce los tiempos de inactividad al mínimo absoluto.
La gran ventaja: Cualquiera que haya utilizado anteriormente CAT2, CAT2-HL o CAT3 puede cambiar fácilmente a CAT3 PRO CR con una brida de liberación cilíndrica y CAT3 PRO TR con una brida de liberación cónica. ¿Por qué? CAT3 PRO CR tiene el mismo soporte de montaje que CAT2, CAT3 PRO TR tiene el mismo soporte de montaje que CAT3 y CAT2-HL.
Sensor de choque CAT3 PRO CR

Sensor de choque CAT3 PRO TR

Resumen de ventajas del CAT3 PRO
Como la nueva generación universalmente aplicable de soportes de antorcha para robots de soldadura, el CAT3 PRO ofrece una protección confiable que simplemente se ajusta a:
- Mejor desempeño gracias a su diseño práctico y robusto
- Fácil instalación en el robot de soldadura
- Funciones de conmutación confiables
- Precisión de reinicio exacta (TCP) y reducción en el tiempo de inactividad del sistema
- Resorte en tamaños XL, L, y M (opcional en S) lo que facilita el ajuste al peso de la herramienta
- Los reemplazos y reparaciones son fáciles de realizar
- Excelente protección contra suciedad
- 100 % compatible con CAT2, CAT2-HL y CAT3
| Dimensiones: | Ø 77 mm, altura 106 mm |
| Peso: | 960 g (sin soporte ni brida) |
| Fuerza de liberación: | (ver figura 1) Deflexión CAT3 PRO CR / CAT3 PRO TR |
| Punto de conmutación: |
|
| Max. deflexión: |
|
| Precisión en el restablecimiento: | (ver figura 2) Dirección X, Y y Z: ± 0.04 mm (a una distancia de 400 mm de la brida del robot) |
| Clase de protección IP: | IP 21 |
|
Capacidad de carga |
máx. 30 V DC / 100 mA |
| Temperatura ambiente: |
|
| Humedad relativa: |
|
Figura 1:
Fuerza de liberación del sensor de choque CAT3 PRO CR y CAT3 PRO TR

La siguiente figura muestra la fuerza estática de liberación de los diferentes tipos de resorte en función de la distancia a la superficie de la brida (figura 2).
Figura 2:
Deflexión máxima en los ejes X y Y
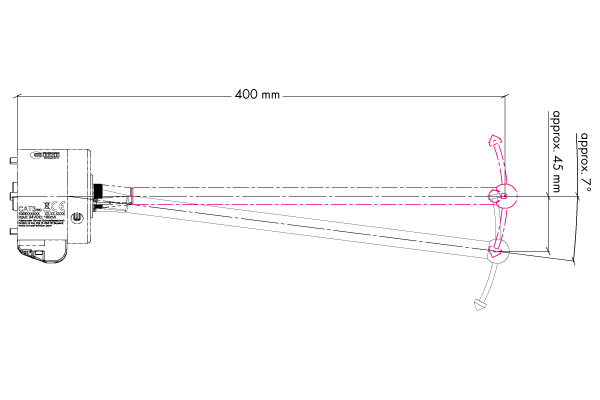
Dirección X, Y y Z: ± 0,04 mm (a una distancia de 400 mm de la brida del robot)