
Anticolisión Robot - CAT3 PRO para robots de soldadura

Cuando mayor cantidad piezas y de ciclos de trabajo se den a lo largo del día, es casi inevitable tener una colisión durante el proceso de soldadura. Que se produzca una colisión mientras soldamos con MIG-MAG al igual que en TIG, con la antorcha contra la pieza, o con el robot contra cualquier superficie, es normal. Eso hará que dañemos la pieza, o destrocemos el robot. Cada reparación o cada cambio de antorcha aumenta considerablemente los costos de producción. Las paradas son muy costosas. Si esto sucede habitualmente, esto puede hacer que los márgenes de fabricación sean cada vez más ajustados. Contar con un sistema de protección que desconecte el robot, solventa el problema. Pero además este sistema debe ser robusto y fiable. El CAT3 Pro de Abicor Binzel es la solución ideal. Utilizar la compensación de motores no es la solución ya que dañan los mismos y generan poco a poco imprecisiones en el robot.
Con los modelos CAT3 Pro, tanto la versión “CR” (versión cilíndrica) o la versión “TR” (versión cónica), protegen la antorcha y el resto de los componentes en el caso de producirse una colisión. Con el Sistema CAT3 PRO nos aseguramos que el robot pare automáticamente cuando detecte una colisión previniendo una rotura. Gracias al excelente sistema de reinicio, el robot volverá a ponerse en funcionamiento con la precisión necesaria. Este sistema de ABICOR BINZEL está diseñado para robots de eje estándar o que lleven el conjunto de cables por encima del tercer eje.
Y lo mejor de todo: Sin tener que reprogramar de nuevo el robot, nuestros sistemas, CAT3 PRO CR y CAT3 PRO TR de ABICOR BINZEL, simplemente conseguirán que vuelva a su posición inicial:
- CAT2
- CAT2-HL
- CAT3
Toda la información en un solo vistazo
Características del CAT3 PRO
En el ambiente tan duro en el que vivimos en las fábricas día a día, las exigencias puestas en los equipos de soldadura son extremadamente altas. Ponemos una atención especial en la calidad y seguridad para minimizar las paradas y tiempos muertos. Los anticolisiones CAT3 PRO CR y CAT3 PRO TR con un micro de desconexión integrado, son más estables y robustos comparados a sus versiones predecesoras CAT3, CAT2 and CAT2-HL. El sistema de exactitud (TCP) para las antorchas de soldadura ha sido infinitamente superado, reduciendo los tiempos muertos casi al mínimo.
La gran ventaja: Cualquiera que con anterioridad haya usado un CAT2, CAT2-HL o CAT3 podrá con gran facilidad pasarse al nuevo modelo CAT3 PRO CR únicamente verificando si el sistema de sujeción es cónico o cilíndrico. ¿Por qué? El CAT3 PRO-CR tiene el mismo amarre que su anterior versión CAT2, y el CAT3 PRO TR las mismas que las versiones CAT3 o CAT2-HL.
Anticolisión robot CAT3 PRO CR

Anticolisión robot CAT3 PRO TR

Ventajas del CAT3 PRO en una visión general
Como la nueva universal generación de anticolisiones para los robots de soldadura, el CAT3 PRO ofrece una fiable protección gracias a:
- Mejor actuación gracias a un diseño más robusto
- Una mayor facilidad a la hora de instalarlo en un robot de soldadura
- Funciones de micros más fiables.
- Un exacto reinicio (TCP) gracias a su mayor precisión minimizando los tiempos muertos.
- Muelles disponibles en diferentes durezas XL, L, M (opcional “S”) facilita el ajuste más adecuado al peso de la herramienta seleccionada.
- Recambios y reparación fácil de llevar a cabo
- Excelente protección contra la suciedad evitando incrustación del polvo ferrítico
- 100 % compatible con el CAT2, CAT2-HL y CAT3
| Dimensiones: | Ø 77 mm, altura 106 mm |
| Peso: | 960 g (sin el amarre y el plato) |
| Liberalización de fuerza: | (ver figura 1) Desviación del CAT3 PRO CR / CAT3 PRO TR |
| Punto del micro: |
|
| Max. desviación: |
|
| Precisión de reinicio: | (ver figura 2) en Direccion X-, Y- y Z-: ± 0,04 mm (a 400 mm de distancia del plato del robot) |
| Clase de protección IP: | IP 21 |
| Capacidad de carga seguridad corte: |
max. 30 V DC / 100 mA |
| Temperatura ambiente: |
|
| Humedad relativa: |
|
Figura 1:
Liberalización de fuerza del anticolisión CAT3 PRO CR y CAT3 PRO TR

El siguiente dibujo nos muestra la liberalización de fuerza estática para los diferentes muelles dependido de la distancia al plato (ver figura 2).
Figura 2:
Máxima desviación en los ejes X y en Y
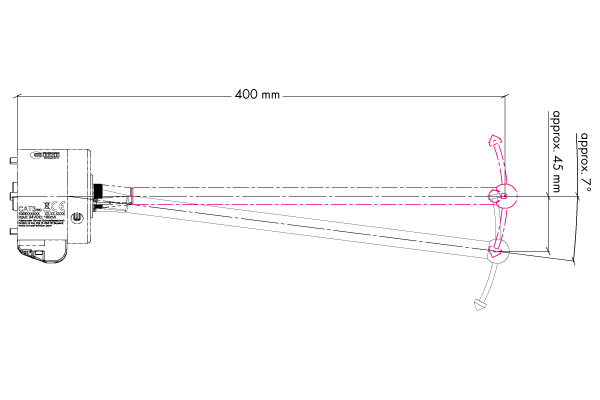
Dirección X, Y Z : ± 0,04 mm (a 400 mm de distancia del plato del robot)